作為英特爾旗下自動駕駛技術公司Mobileye的首席執行官和聯合創始人,Amnon Shashua教授是全球自動駕駛領域公認的領軍人物之一。在他的視野中,自動駕駛汽車從技術驗證走向大規模商業落地,絕非一蹴而就,而是面臨著一系列復雜且相互交織的挑戰。這些挑戰不僅存在于技術開發層面,更延伸至系統安全、法規標準、基礎設施和社會接受度等多個維度。從技術開發的角度審視,主要挑戰可歸納為以下幾點:
- 感知系統的可靠性與可擴展性:自動駕駛汽車依賴傳感器(如攝像頭、激光雷達、雷達)和復雜算法來感知和理解動態環境。Shashua強調,關鍵在于構建一個既高度可靠又能大規模部署的冗余感知系統。例如,如何確保系統在極端天氣、復雜城市路況或面對罕見“長尾”場景時依然穩定工作,是技術開發的核心難題。這需要算法具備強大的泛化能力和持續學習機制,同時確保硬件成本可控,以滿足大規模量產的需求。
- 安全驗證與責任歸屬:證明自動駕駛系統比人類駕駛員更安全,是技術落地的前提。如何量化并驗證這種安全性,尤其是在面對數以萬億計的可能駕駛場景時,是巨大的技術挑戰。Shashua及其團隊倡導“責任敏感安全”(RSS)等數學模型框架,試圖為自動駕駛決策建立可驗證的安全準則。但將理論模型轉化為被全球監管機構廣泛接受的、統一的安全標準,并明確事故中的責任劃分,仍需大量的技術論證和行業協作。
- 高精度地圖與實時更新的瓶頸:許多自動駕駛方案依賴厘米級高精度地圖進行定位和路徑規劃。但制作、維護并實時更新覆蓋全球道路的高精度地圖,是一項浩大且昂貴的工程。技術開發需要解決如何高效、低成本地眾包地圖數據,并實現地圖信息的近實時動態更新,以應對道路施工、臨時交通管制等變化。
- 計算架構與功耗的平衡:自動駕駛汽車堪稱“移動的數據中心”,需要強大的車載計算平臺處理海量傳感器數據并進行實時決策。Shashua領導的Mobileye專注于開發高效能的視覺處理芯片和計算方案。挑戰在于,如何在有限的功耗和車規級硬件條件下,提供足夠的算力以運行日益復雜的感知、預測和規劃模型,同時保證系統的實時性和可靠性。
- 從駕駛輔助到全自動駕駛的漸進之路:Shashua主張通過漸進式路徑實現自動駕駛,即從高級駕駛輔助系統(ADAS)逐步升級。技術開發因此面臨雙重任務:一方面要不斷優化ADAS功能,積累數據和用戶信任;另一方面要為最終的全自動駕駛(L4/L5)研發全新的系統架構。如何平滑過渡,并確保兩個技術路徑在數據、算法和硬件上能夠有效協同與復用,是戰略性的技術挑戰。
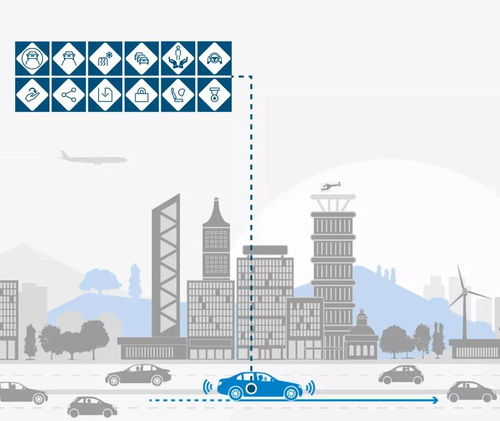
- 車路協同與系統整合:單一車輛的智能存在局限。未來的大規模落地有賴于車與車、車與基礎設施的協同。技術開發需要推動通信協議標準化,并設計有效的協同感知與決策算法。這涉及到跨行業、跨領域的深度整合,技術復雜性極高。
Amnon Shashua的觀點揭示,自動駕駛技術開發的挑戰已從早期的算法原型創新,轉向構建一個安全、可靠、可擴展且經濟可行的完整系統解決方案。這要求技術創新必須與工程實踐、標準制定和產業生態建設緊密結合。只有克服這些深層次的技術開發障礙,自動駕駛汽車才能真正駛入尋常百姓家,實現其重塑未來出行的愿景。